近期,一款名为《原子之心》的3A游戏大作在全球社交媒体上引发热议。平行宇宙下的苏联能否在人工智能和基因工程的帮助下,建成工业化的“乌托邦”?这个问题或许永远没有答案。然而,游戏中设想的空中都市、机械服务员、名为“大集体2.0”的苏联互联网、甚至拥有自主意识的电冰箱……曾真实存在于冷战时代苏联科学家的幻想之中。

游戏中的幻想城市。来源/游戏《原子之心》截图
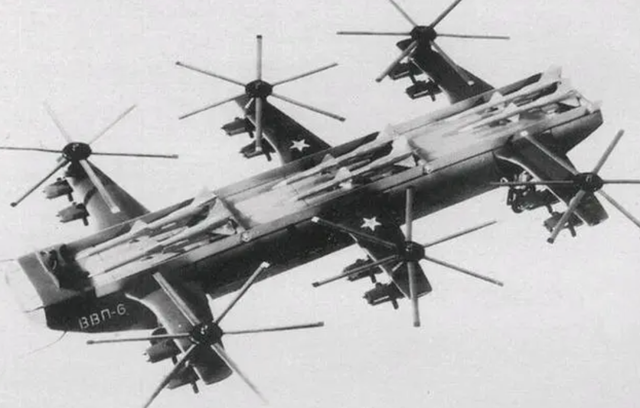
浮空要塞苏联的雅克VVP-6空中作战试验平台
苏联解体后,诸多曾经被深锁在保险柜中的图纸和模型,被以“军事透明化”的名义公开展示在了充满猎奇心理的西方记者面前。其中一款代号为雅克VVP-6的飞行平台,很快引起了西方军事观察家的注意。毕竟除了其机身两侧各安装有3组6叶旋翼之外,其机背装载甲板之上更两两并列布置着六具萨姆-2型地空导弹发射架。这样的配置很难不令人联想到这是一款可以在空中发射导弹的“空中作战试验平台”,一时间,苏联空军曾研制“空中炮艇”的相关新闻赫然出现在西方的各大主流军事媒体上。
雅克VVP-6模型。来源/网络
但仔细分析雅克VVP-6的相关资料不难发现,其设计初衷与所谓的“空中炮艇”相距甚远。1956年7月4日,美国空军刚刚列装部队不久的U-2型高空侦察机凭借其接近当时飞行器极限的高度和速度,大摇大摆的在苏联领空飞行了8个小时。
值得一提的是,当时的苏联并非没有击落U-2侦察机的手段,1957年在莫斯科首次展出并迅速列装部队的萨姆-2型地空导弹,最大作战高度可达32000米,足以击落实用升限不过24384米的U-2侦察机。唯一的问题在于,U-2侦察机往往单机行动,且航线诡异莫测,给萨姆-2型地空导弹的提前设伏带来了很大的困难。
正是在这样的背景下,刚刚成功研制了雅克-24型纵列双旋翼重型运输直升机的雅克设计局突发奇想,设计出了雅克VVP-6型飞行平台。按现有资料来看,雅克VVP-6之所以被设计成长49米、宽6米的超大尺寸,并通过搭载24台涡轴发动机所提供的强劲动力保证其45至50吨间的强大运载能力,便是为了能够一口气带上整个满编的地空导弹连。
因此,雅克VVP-6型飞行平台对抗U-2侦察机可能的作战模式,并非是悬停在半空之中直接发射导弹,而是搭载着地空导弹连在空中待命。在U-2侦察机进入苏联领空之后,再依照雷达系统的指引,迅速飞抵U-2侦察机航线附近预设的伏击阵地,完成整个地空导弹连的卸载,对目标展开攻击。
不难看出,雅克VVP-6型飞行平台最初的设计更接近于一个体型空前庞大的运输直升机,而并非成为一个防空导弹的空中发射平台。毕竟两两并列布置的防空导弹即便在机背的甲板之上也很难完成全方位转向,在追踪目标时必须旋转整个机身,才能改变导弹朝向的角度,可谓极其不方便。
通过增加萨姆—2型地空导弹的部署数量以及对U-2侦察机活动规律的长期监控和研判,苏联防空军最终于1960年5月1日在斯维尔德洛夫斯克州成功击落了U-2侦察机。值得一提的是,1962年9月9日仅拥有少数萨姆-2型地空导弹的中国人民解放军也击落了长期流窜于我国上空的U-2侦察机,所用的正是苏联方面希望通过雅克VVP-6型飞行平台实现的防空导弹机动设伏战术。

U-2侦察机。来源/网络
随着U-2侦察机不可战胜的神话破灭,雅克VVP-6型飞行平台似乎也失去了存在的价值,但雅克设计局似乎不想放弃这一项目,于是,将雅克VVP-6型飞行平台与该设计局正在研制的垂直起降战斗机相结合组成“空中航母”的设想一度甚嚣尘上。
雅克设计局的这一设想在理论上颇为可行,毕竟仅从尺寸来看,雅克VVP-6型飞行平台的内置容量可能与波音777型客机相当,足以容纳大量的弹药和备件。搭载于其机背甲板之上的雅克-38型垂直起降战斗机可以在远离地方前沿防空火力圈之外起飞,在向敌防御支撑点或装甲集群倾泻火力之后再返回雅克VVP-6型飞行平台补充弹药,随即展开二波打击。
然而,在看似美好的愿景面前,是现实的无奈。且不说雅克VVP-6型飞行平台自身还存在诸多尚未攻克的技术难题,单是雅克-38型垂直起降战斗机本身也存在着诸多无法解决的技术难题。
从1975年开始,雅克设计局便着手开始研制雅克-38型垂直起降战斗机的后续型号——雅克-41。甚至在后期推出过加入隐身和超音速作战设想的雅克-43,然而,随着苏联解体,上述研制计划悉数宣告下马,其中雅克-41型的部分图纸被私有化后的雅克设计局转手卖给了洛克希德·马丁公司,并被运用于F-35型战斗机的设计之上。
“终结者”苏联的机械士兵计划
近年来,一则有关苏联曾在冷战时代研发过“狗头机器人”的新闻在互联网一度以所谓“解密档案”和“纪录片”的形式传播开来,尽管其具体表现形式不尽相同,整体内容却大致相仿。
按照这些来路不明的说法,随着冷战的全面展开,卫国战争中损失了大量有生力量的苏联军方,为了避免在下一场战争中出现巨大的人员伤亡,秘密开启了能够取代人类士兵的相关科研计划——生产一支能够绝对服从命令,并在战场上无惧炮火的机器人兵团。
尽管苏军高层对这个项目寄予了极大的期望,技术难题还是很快令这个项目陷入举步维艰的困境,毕竟即便以今天的科技水平,要研制出人体结构的机器人也并非易事,更何况是冷战时期。
当时苏联的大部分电子设备采用结构相对简单的电子管,仅能够处理简单的程序,无法完成复杂的命令,通过这些简单的电子设备来制作了一台复杂的机械大脑,更是一项不可能完成的任务。在山穷水尽的情况下,苏联军方不得不另辟蹊径:既然目前的技术无法建造一个成熟的机械大脑,那么干脆就采用现成的,将生物大脑嫁接在机械躯体之上的想法应运而生。
此时,苏联在器官移植领域占据优势。1952年,苏联医学家弗拉基米尔·彼得罗维奇·杰米霍夫首创了冠状动脉搭桥手术,拯救了成千上万的生命。1954年,这位天才医生又完成了世界首例活体移植手术,将一只小狗的前半身嫁接到了一只体型更大的德国牧羊犬身上,虽然手术完成6天后,这条狗还是死去了,在移植后的一段时间内,两只狗却都保持了视觉、嗅觉以及发声能力。
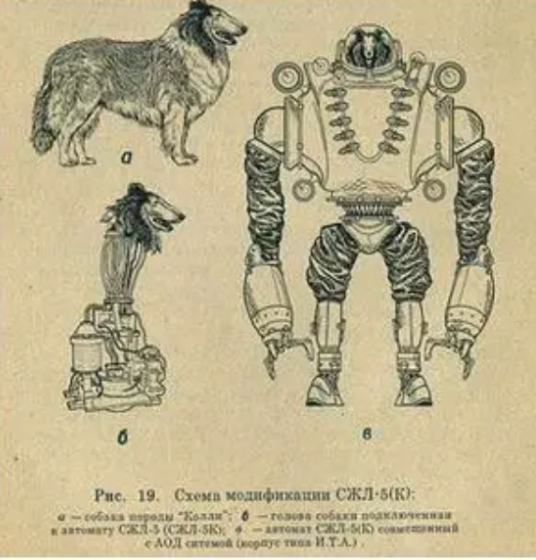
在“狗头机器人”故事的相关叙述中,1958年,杰米霍夫被苏联军方聘为医学顾问,领导了一个秘密科研小组展开了名为“创建1号机器人”的研制工作。这个计划的目的是希望通过移植动物的头部器官取代复杂的机器大脑,通过机械电脉冲产生的神经电信号来实现对战斗机器人的控制。

苏联“狗头机器人”实验室。来源/网络
项目开展之初,杰米霍夫曾在老鼠、猴子与狗之间做出了一番艰难的取舍。老鼠由于身体太小而被率先放弃,之后的科研小组更钟情于猴子,从生物学角度来看,猴子从各个方面显然更接近人类。但最后杰米霍夫还是选择狗作为实验目标,狗在服从性、驯养方面上都远高于猴子,更何况,杰米霍夫教授在犬类的头部移植领域积累了丰富的经验。
根据互联网展现的资料和照片,杰米霍夫领导的科研小组似乎成功将犬的头部活体移植到由纯机器组成的维生装置上面。维生装置被安放在人形机器的头部,由机器连接的犬首能够进食,也会在电流的刺激下做出几个简单的反应,却无法完成诸如控制机械身体行走、抓拿物品等较为复杂的动作,并且,由机器维持的犬首在实验室内的生命周期很短,更不用说是在室外更加复杂的环境了。
故事的结尾,杰米霍夫教授创造性的工作最终被叫停。苏联军方花费了大笔经费和时间所希望得到的是通过训练可以绝对服从命令、携带大量武器投入战场的犬首武装机器人,而不是一个只能在实验室里面对自己的宠物狗。1969年,进行了10年的计划被宣布终止。
1991年,苏联解体后,有部分资料以科学实验、民用医学的名义解密。唯一值得欣慰的是,在长达十年的研究过程中,杰米霍夫虽然没有研制出苏联军方期待的使用犬科动物大脑武装起来的战斗机器人,却为人类的医学技术研制出了体外心肺循环系统,也就是现在人们熟知的人工心肺机系列。
“狗头机器人”的故事究竟是真是假?目前仍没有一个明确答案。毕竟,杰米霍夫的确曾在犬类身上进行过器官移植和嫁接试验,但如果就此认为,苏联军方开放过“狗头机器人”却并不尽然,除了生物与机械的有机结合至今在技术上仍有待突破之外,更重要的是我们无法想象一个拥有机械躯干的狗能在战场如训练有素的士兵那般战斗。
苏联“狗头机器人”的想象图。来源/网络
或许,编造这个故事的人是受了科幻小说的影响,但他们显然没有想过,这一个看似刀枪不入的怪物在战场之上也未必是一辆主战坦克的对手,更不用说起到扭转战局的作用了。事实上,整个冷战时代,所有军用机器人的研发,仍集中于以遥控方式代替人员从事危险工作的领域。
如在1986年的切尔诺贝利核电厂事故中,苏联中央机器人技术和技术控制论科学研究所便迅速研制了一批救灾机器人。当年6月初,第一台RR-1型轮式探测机器人就被送到切尔诺贝利核电事故的现场。它重39公斤,安装了电视摄像机、辐射剂量强度测量仪,采取电缆供能,每5秒前进1米,能在每小时18000伦琴的辐射下工作。它的主要作用是进一步深入核污染的核心地带,安装的一只小巧机械手臂可以采集单独小型物体、探测辐射等级以及评估阻挡清除工作的各种物件的数量和体积。同月,第一台因地制宜制造出来的TR-A1清理机器人到达现场,外形与科幻作品中的机器人完全不同,而是一台推土机模样。TR-A1是第一种带有悬挂工作器具(推土机刮刀和料斗外形)的机器人。
此后,越来越多清理机器人取代人类加入到了危险的工作中来。除中央机器人技术和技术控制论科学研究所外,莫斯科军事工业大学、全俄运输机械制造科学研究所等单位也自发向事故中心提供自己生产的清理机械人。因此,在整个切尔诺贝利核爆炸事故中,总共生产和使用了约60台轻型、重型清理和探测机械人。这些不用休息,始终保持全力工作的机械人有效协助了当时的苏联政府将人类有史以来最大的核灾难遏制在可控的范围之内。
“云上大集体”苏联对互联网的运用和想象
众所周知,人类最早关于计算机网络的理论基础来自1948年诺伯特·维纳发表的《控制论——或关于在动物和机器中控制和通讯的科学》一书。苏联官方对这本书有过截然不同的两种态度。苏联《哲学问题》杂志在1953年发表一篇名为《控制论为谁服务》的文章,指出“控制论只不过是被想象出来的一个大骗局”,是给帝国主义“一点延长寿命的希望”,因为“不要工人,而只要一些为计算机的巨脑所控制的机器所实现的生产过程。没有怠工,没有罢工,甚至没有革命起义机器代替脑,机器不需要人。这对资本主义是多么美妙的前景啊”。
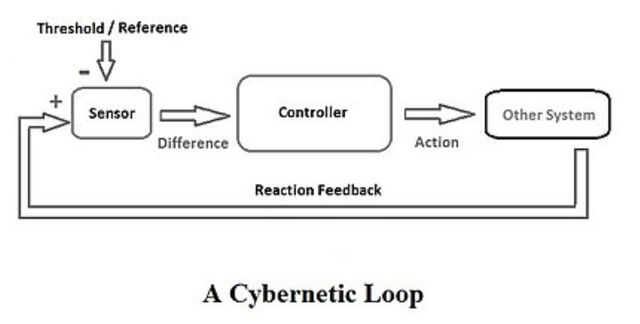
控制论原理图,控制论在中国与信息论、系统论一起称为“老三论”。来源/网络
但仅仅过了两年,同样是在《哲学问题》杂志上,苏联专家学者又指出,控制论会发起第二次工业革命,用智能机器取代脑力劳动者,从而——就像先贤曾预言的——解放全人类的思想。文中更严厉地驳斥:之前对控制论意识形态上的曲解或许是有人刻意为之,为的就是破坏社会主义联盟、拖慢苏联科研人员在这一前沿领域的进步。
以这篇名为《控制论的若干基本特征》的文章为标志,苏联的控制论研究迎来了科学的春天。1962年,苏联共青团的年轻科学家们联名上书赫鲁晓夫。提议建立名为“为了统计、计划、管理苏维埃社会主义共和国联盟的经济而建立的收集和处理信息的全国自动化系统”(the All-State Automated System for the Gathering and Processing of Information for the Accounting, Planning, and Governance of the National Economy,USSR)。苏联领导层自然不会选用如此拗口的名字,于是他们大笔一挥,将这个系统改名为“全国自动化系统”,英文缩写:OGAS。

从赫鲁晓夫时代开始,苏联就打算发展基于控制论用于资源分配的去中心化互联计算机化系统
从一些细节上看,OGAS与今天的互联网有许多相似之处,甚至已经设想出了取消纸币后的虚拟电子货币系统。但事实上,OGAS是一套完全基于计划经济模式下的全国控制系统,它的“云计算”是通过命令和控制协议,自动计算、模拟、优化计划经济。位于莫斯科的中央电脑会根据收到的所有数据来规划下一年的经济,在所有指标都已量化的基础上,保证机器计算出来的目标绝对合理公平公正,它的“智能国家”是位于莫斯科的“大脑”可以同时处理数百万的信号,协调各地区之间的发展。
尽管OGAS所需的资源和其规划令人咂舌,设计者计划用三十年的时间、耗资200亿卢布来完成三层网络的架设:第一步完成莫斯科的一级电脑和200个设在大中城市的二级电脑的连接;第二步再由二级电脑再连接2万个分散在各地的计算机终端;最后建设全国统一的计算机网络。仅从技术层面来看,OGAS并非不能实现,但这套系统最大的问题在于,对于苏联的各级官僚而言,制定计划关乎的是手中的权力而并非科学。
1970年10月1日,苏联政治局会议上讨论OGAS的可行性时,反对最为激烈的是苏联财政部长瓦西里·加尔布佐夫。此后OGAS每一次尝试的失败,其实都是科学与官僚体系的冲突。显然,科学家相信理性主义,并试图为计划经济佐以互联网的巨大算力,但苏联权贵追求不同的利益,比如维持现状。
冷战结束的30多年后,《原子之心》再次唤起了人们对苏联有别于西方的科技树的无限想象,更感受到科技发展的进程往往是在特殊的历史条件下多重力量推动的结果。
参考文献:
1、《海空战鹰:舰载垂直起降战斗机雅克-38和雅克-41》,高智著,中国人民解放军出版社,2016年1月
2、《亲历切尔诺贝利》,[俄]格里戈里·梅德韦杰夫 著;刘建波 译,民主与建设出版社,2019年1月
3、《互联网简史》袁载誉,中国经济出版社,2020年5月
